Compared with traditional robots, self-reconfigurable robots have the characteristics of versatility, good robustness and strong adaptability, which has become a hot topic of robot research in recent years. The basic robot unit is divided into two types, sphere modules and stick modules. Through the center of the ball three mutually perpendicular plane and three ring functioning as the sliding track of the system, dividing the circular orbit at a certain distance to set mechanical connection points, and place the electromagnetic coil inside the sphere module, meanwhile setting the connector and the permanent magnet on both ends of the bar at the same time. By controlling the electromagnetic coil inside the module to reject or appeal the permanent magnets to drive the system. Power supply, control unit and communication module are placed inside the center of the robots. In real life, this self-reconfigurable robot has many applications. For example, in application scenarios such as deep-water operation or outer space exploration, the target and task are various, but the equipment that can be carried in each action is very limited. The self-reconfigurable robot can realize multiple functions simultaneously. Moreover, in the disaster areas after the earthquake and other dangerous occasions, it can play a role by replacing damaged individuals with self-repairing ability.
项目组人员:
李信卓2018级计算机科学与技术专业,赵逸飞2018级计算机科学与技术专业
项目指导教师:周航
项目级别:北京市级
项目简介:
自重构机器人相比传统机器人具有多功能性,鲁棒性好,适应性强的特点,是近年来机器人研究的热门领域。本项目设计机器人基本单元分为两种,球形,杆形。过球中心的3个相互垂直的平面与球面相交得的的3个圆作为杆端点的滑动轨道,等分圆设置机械连接点,并在球内连接点两侧设置电磁线圈,同时杆两端设置连接器与永磁体,通过球内电磁线圈对永磁体进行排斥和吸引进行驱动。球杆内部放置电源,控制电路,通信模块。在现实生活这自重构机器人有很多应用领域,如在诸如深水作业或外太空探险等应用场景中, 目标任务多样, 但每次行动所能携带的装备非常有限,自重构机器人可同时实现多种功能;而在震后灾区等危险场合,其通过更换损坏个体具有的自我修复能力可以发挥作用。
项目创新点:
本项目使用机械连接器进行个体间连接以达到稳定的整体结构,同时直接使用电磁线圈对永磁体排斥与吸引进行驱动,从而调整杆端点在球表面的位置,使其在不同连接点间移动,这样使球面产生更多的连接点,丰富了个体间的连接方式,极大程度扩展了机器人的构型空间。
项目成果:
实物作品完成个体机器人制作,基本的连接与驱动运行流畅。控制大量机器人个体完成变形,位移,取物的操作演示。
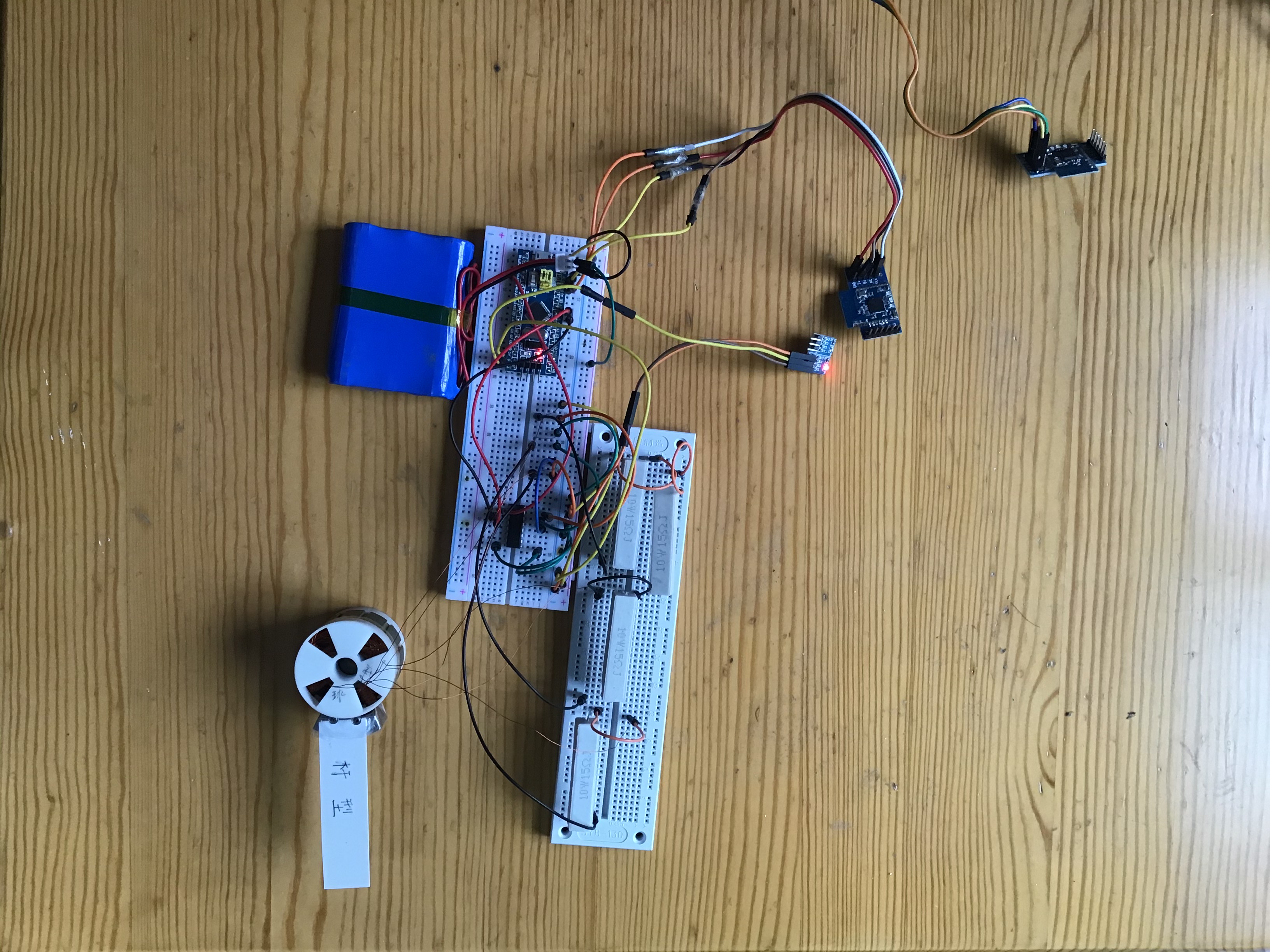
个体机器人实物图
