In the library, when people search for a book through the library retrieval system, the book is not lent out, but it is found that it is not on the shelf. At this time, in places where a large number of books or materials are stored, it is extremely important to troubleshoot incorrect placement. This project is committed to reducing the waste of resources caused by repetitive labor, and is aimed at the pain points of the libraryadministrator's book and personnel management workload. By providing the library with a variety of management functions for books and readers. Including regular inventory correction of books, retrieval and guidance of books required by readers, checking stranded readers and voice prompts when the library is closed. Realize one-click management library unmanned management service.
项目组人员:
叶佳俊 2018级通信工程专业杨鸿雨 2018级通信工程专业
陈振鹏 2018计算机科学与技术
项目指导教师:余贶琭
推荐级别:国家级
研究背景:
使用RFID作为货物盘点成为现在的主要趋势,且高频射频识别技术有多个标签同时识别、识别距离远、识别效率高的特点。但是使用手持RFID盘点设备进行人工盘点需要消耗大量的劳动力,同时盘点效率低,操作复杂。另外ROS系统提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。适合于复杂系统的二次开发。可以搭载激光SLAM导航等实用功能。
实验过程:
项目初期,我们采用由树莓派直接控制的实验小车,搭载Linux操作系统,采用Python语言实现了二维码识别与摄像头巡线运动的基本功能,编写书籍信息对比程序,连接数据库,完成了最小系统的实现。
项目中期,我们学习RFID设备原理,激光雷达多点导航技术,UI界面设计框架,进行更加详细的系统设计以及Demo测试。针对不同高度,不同层数的书架,我们同时设计了搭载RFID模块的升降装置,进行逐架、逐层扫描。对于运动平台小车,在前期树莓派小车的学习基础上,我们学习ROS操作系统,实现激光雷达多点导航、定位。
未来控制小车,我们设计了PC端以及Android移动端两种软件,在整个系统的后台搭建服务器。由于交互设备较多,我们对局域网进行多端数据交互、处理以及发布指令进行测试。
在实现系统的目标功能后,我们又测试了人脸识别算法。开发出闭馆巡逻提示功能,在图书馆闭关后巡逻提示同学们有序离开。
项目后期,我们将所有功能集成,统合,进行多项测试、调试。最后进行资料整理,拍摄演示视频。
应用:
该机器人未来可以应用于资料库管理、工业仓库货物清点、港口清点等行业领域。降低大量劳动力成本。同时也可以用于特定场合的人员引导。
未来展望:
本项目未来可以开发集成更多实用性功能,完善图书馆的各项管理工作。同时也可以继续完善现有功能,提高书本扫描效率和人脸识别准确率。
项目创新点:
本项目希望实现对图书馆图书和读者的一键式管理,以减轻重复劳动力带来的资源浪费。
1.在管理书籍方面,对书架中书籍进行定期盘点纠错。
2.在读者方面,为读者提供书籍检索并引导路线的功能,在闭馆时提供检查是否有滞留读者并语音提示的功能。
3.实现对图书馆一键式、一体化管理。
项目成果:
1:开发ROS机器人多点导航代码,实现机器人在固定路线的巡航。
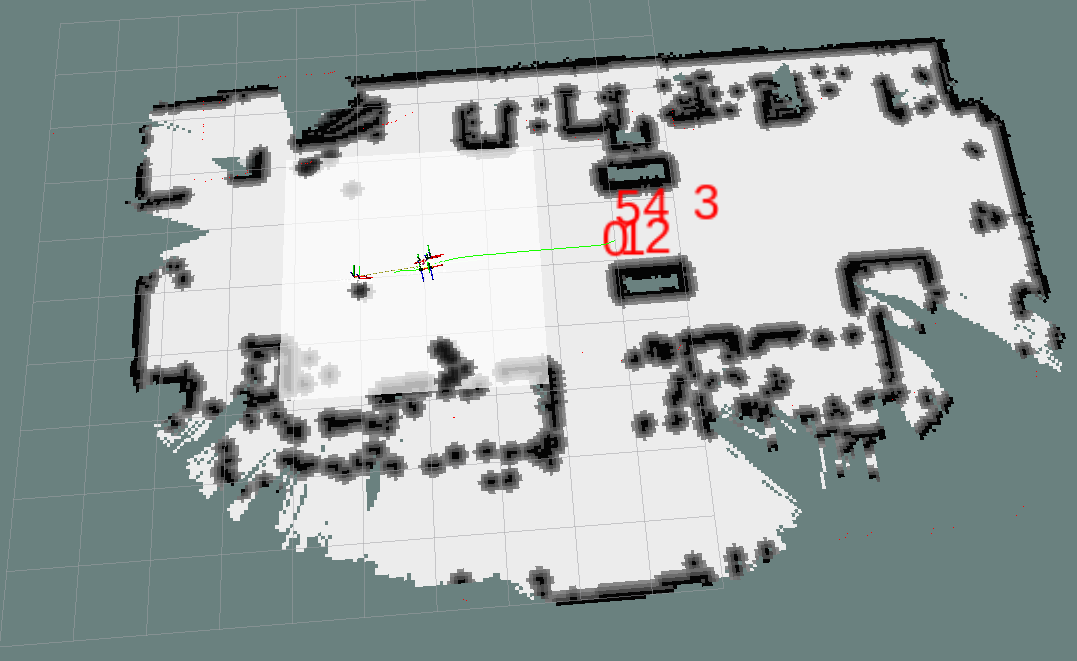
图1:图书馆激光地图及目标点规划
2:设计升降杆,实现RFID从低到高每一层的自主扫描及升降。
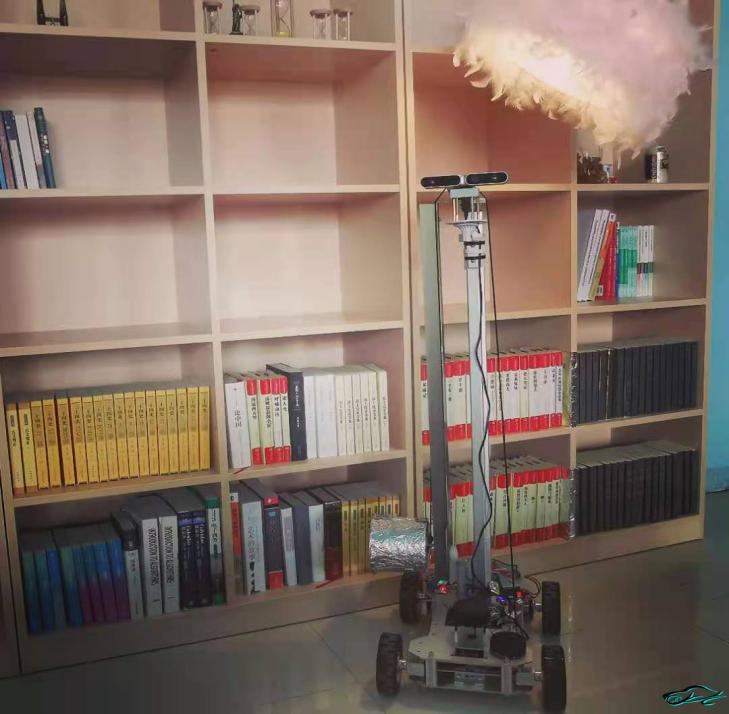
图2:机器人小车实物图
3:实现多种场景下较高的书本成功扫描率和错误书本检出率
|
|
场景一
|
场景二
|
场景三
|
|
书本成功扫描率
|
88.9%
|
88.5%
|
88.6%
|
|
错误书本检出率
|
99.8%
|
99.8%
|
99.7%
|
图3:扫描正确率
4:制作出用户操作界面、服务器。实现用户一键式操作机器人小车完成三个基本功能。
图4:UDP/TCP通信协议
